


最近自動車の話題と言えば自動運転と電気自動車であろう。自動運転については国も新たな日本の成長戦略として推奨し、国土交通省が政府方針を、経済産業省が取り組み方針を作成するなど活動華やかである。
自動運転技術にはまだまだ多くの課題があり、自動車メーカーや情報通信の会社が競って研究開発を続けている。
テレビや新聞記事では、ナビゲーションで道路に対する車の位置情報を確認し、カメラでとらえた車の周りの画像を認知して道路情報や障害物情報を処理するなどソフトウエア方面から課題を解決することが取り上げられているが、その他にもたくさんの課題が存在すると考えられる。
著者の得意とした『走り』の観点から考察すると、ハードウエアから来る車の基本性能である『走行性能』が課題としてあげられ、解決が非常に難しい問題が存在すると思う。
自動運転は幾つかの運搬手段で実用化されている例はある。軌道上を走るモノレールや、工場内で使用されている部品運搬車などである。
これらの実用化された車両の走っている軌道は決められた軌道であることや、路面が非常に平らであるのでタイヤに入る外乱が少ない。また速度も低い。(最高時速:ゆりかもめ60km/h,部品運搬車5km/h以下)
しかし一般道路の状況を冷静に考えてみると、現在自動運転されている車両の走るような平らな道はなく、高速道路などは100km/h前後の速度で走る。
整備の行き届いた真っ平らな高速道路などではソフトウエアに従って車を理屈通りコントロールすれば良いが、路面に凹凸があった場合はその対処はどうするのだろう。
路面の凹凸というのは例えば、路面のアスファルトの一部が剥がれて浅い陥没があった場合、落下物があった場合、轍(わだち)があった場合などである。
図1に示すように、路面に突起がありそこを車が走るとドライバーがステアリング(ハンドル)を回さなくても突起にタイヤが押され横力が働く。読者も道路の突起物でステアリングが勝手に動かされヒヤッとした経験のある方も多いと思う。
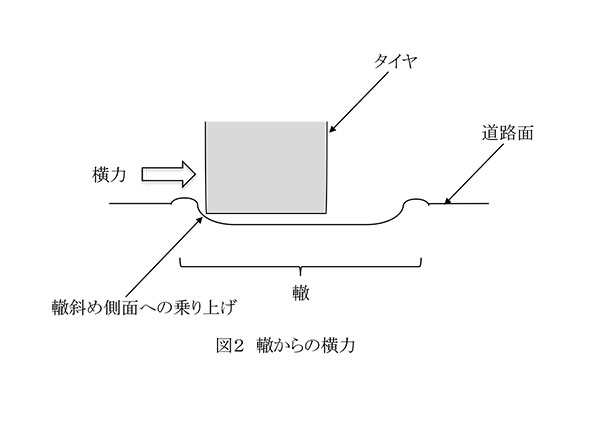
また、図2に示すように雪道には轍が形成される。この轍路を走るとタイヤが轍を乗り越えようとする時タイヤに横力がかかる。
高速道路でも轍ができる場合がある。著者は猛暑の二十年ほど前に東北自動車道路を走った時、アスファルトが柔らかくなり轍ができていてタイヤが取られるため、不安定でしょっちゅう修正操舵を行い気を使って運転した経験がある。
このような場合どんな現象が起こるかを考察してみる。
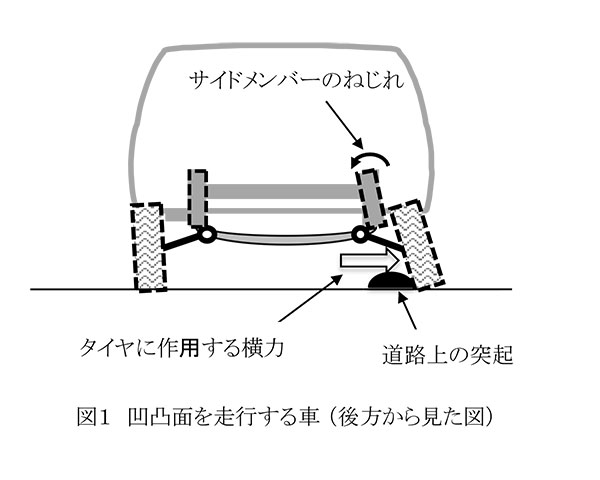
車が剛体であれば横力がかかってもタイヤは傾くことがない。しかし鉄板で出来た車は剛体ではなく図1に示すように突起に押されてタイヤは傾く。この場合はFrサスペンションが取り付けられているFrサイドメンバーの剛性を言う。
図1のようにタイヤが突起にぶつかると車は最初横に押されるが、タイヤは左方向に傾く。さらにこの場合タイヤ自身が左方向に転がろうとして、車はドライバーの意思に関係なく左方向へ旋回しようとする。右に車が押されるのとタイヤの傾きにより左に勝手に旋回しようとすることが重なるためフラフラと複雑な動きをすることになる。サスペンションにはある程度タイヤが傾かないような調整機能があるため傾き具合は緩和されるが、サスペンションの取り付けてある土台の鉄板ボデーの剛性が低いとその調整が効きにくい。
運転される皆さんも経験があると思うが、こんな時はとっさにステアリングを操作してまっすぐ走るように修正する。そしてできればそうならないように道路上の突起や陥没、轍などが目に入った時、前もって予測して修正操舵を考えながら走ると思う。
自動運転でこの対処ができるのだろうか。10km/hや20km/hの速度の遅い領域では不要な旋回が起こっても進む距離が短く修正可能であるが、100km/hの高速で不測の旋回が起こると進む距離が大きく修正するまでにどこかに衝突する。
また雪道の轍(わだち)路ではタイヤが轍の横壁に乗り上げる時横力がかかり、ドライバーの意思に関係なく旋回が発生する。その結果タイヤが轍を飛び出したり、逆に戻ったりして不安定になることがある。その場合、路面がツルツルした摩擦が極端に小さい氷面であることが多く心理的に恐怖感を感じたり、極端な時にはスピンして他の車や障害物にぶつかる危険性もある。
対策は進行方向を修正すれば良いのであるが、そのためには応答性を上げる必要がある。
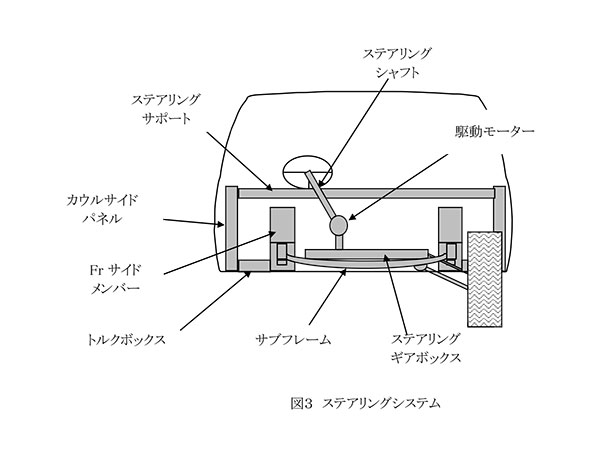
ステアリングを回してタイヤの角度を変える構造図を図3に示す。タイヤの角度を変えるまでには多くの部品を介してステアリングの駆動モーターの力をタイヤに伝える必要がある。
自動で予定外の旋回を修正するということは、次のような過程を経ることになる。
- 車の加速度センサーが旋回挙動を感知してがステアリングの駆動モーターに回転するための電流を送る。
- 駆動モーターが駆動力を発生しステアリングシャフトを回す。
- ギアボックスが動き出しタイヤの角度を修正しようとする軸方向の力を出す。
- その力が一部はタイヤにかかり残りの力がステアリングシステムの下記の多くの構造物(鉄板ボデー部品)にかかり変形をさせる。
(サブフレーム、Frサイドメンバー、トルクボックス、カウルサイドパネル、ステアリングサポート、ステアリングシャフト、ギアボックス) - 鉄板ボデー部品の変形が終了した後はすべての力がタイヤの回転に使われる。
この過程をクリアーするための時間は馬鹿にならない。駆動モーターに電流が流れてもローターは慣性力を持っているため回転し始めるまでに時間がかかること、ギアボックスにはバックラッシュがあること、サスペンションのゴムブッシュは柔らかい弾性体であるためゴムが押しつぶされるまでの時間が必要、そして鉄板ボデー部品の変形に必要な時間である。著者は測定したことはないが、感覚的には1秒近くセンサーが突起物を感じた時からタイヤが回転するまでに時間がかかるのではないだろうか。
1秒と言えば高速道路で100km/hで走行している時に突起で急に方向が変わり、自動で修正した場合約28m進んでしまっていることになる。
突起があってもタイヤの傾きを最小限に抑え、自動の修正操舵が完了するまでに車が横に飛び出す量が少なくすることが、一つの課題解決となる。その方法は過程のNo.4の構造物(鉄板ボデー部品)の剛性を高めてやることである。
ここでは数少ない剛性を例に挙げたが、著者の書籍に示すように自動運転に関与すると考えられる沢山の剛性の改良点がある。特に剛性の高い欧州車には日本車は見習う必要があるし、日本車の低いボデーの剛性を上げてやらないと自動運転技術は欧州車に劣ることになる。
いくら剛性を高めても鉄板ボデーは剛体であるわけではないので人間が行うような予測技術を発達させることも必要条件になる。
最近の発達したAIによって予測修正も対策方法であるが、突起や陥没や轍の深さや形状をどうやって検知するのだろうか。非常に難しい課題であると思う。
つまるところは自動運転の安全速度の限界があるような気がするし、雪道などでは自動的に自動運転が解除されることも必要である。その速度域を上げるためにも、またどんな路面でも走れるように基本性能である『走行性能』を向上する必要があると思う。
誰でも考えることだと思うが、理想的な路面である軌道上を走る鉄道が一部しか自動運転化されていないのに、なぜ無軌道の自動車が今にも自動化できるような話になるのだろうか。
鉄道は大量輸送であり多くの人命を預かっているから万一を考えて自動運転はしないのだということかもしれないが、自動車の自動運転が広まればドライバーの数や周りの歩行者の数などを考えれば、あちらこちらで事故が起こるとすると鉄道の限りではない。
現在自動車そのものを開発しないGoogleやUberなどのソフトウエアやサービス会社が自動運転のフロンティアとしてシステムを開発しはじめ、それを自動車会社が後を追い開発を進めている。
しかし自動運転に対する自動車そのものの構造が持つ弱点、例えば今回記述した「自動運転と走行性能の関係」などをしっかりと把握した上開発していかないと危険な制御システムが出来上がるし、それ以前に開発中に事故などが起こり風評被害で自動運転の開発に悪影響を及ぼすことにもなりかねない。自動車会社も開発を急ぐあまりその危険性の対策をおろそかにすることなく、また自動車の基本構造と性能を把握していない会社に対してその弱点を公表し、全ての会社の開発の安全性を確保することは自動車会社の義務と考えられる。
自動運転は将来必要だと考えられるし、進めなければならない技術ではあるが、モーターショーなどでもてはやされる自動運転によるトランスポートシステムなど夢のような話ばかりでなく、人命に関わる基本性能に関する課題も明確にして開発を進めることを期待したい。